









西门子MM420变频器 西门子MM420变频器
浔之漫 智控技术有限公司 上海诗慕自动化设备有限公司
本公司销售西门子自动化产品,,质量保证,价格优势
西门子PLC,西门子触摸屏,西门子数控系统,西门子软启动,西门子以太网
西门子电机,西门子变频器,西门子直流调速器,西门子电线电缆
我公司大量现货供应,价格优势,,德国
西门子数控伺服系统802C S、802D SL、810D DE、820D SL、840C CE、840D DE、840D SL、840Di SL、S120数控系统、数控伺服驱动模块、控制模块、电源模块、备品备件等。本店产品质量按西门子原厂质量标准。
昆山后创机电设备有限公司本着“以人为本、科技先导、顾客满意、持续改进”的工作方针,致力于工业自动化控制领域的产品开发、工程配套和系统集成,拥有丰富的自动化产品的应用和实践经验以及雄厚的技术力量,尤其以 PLC复杂控制系统、传动技术应用、伺服控制系统、数控备品备件、人机界面及网络/软件应用为公司的技术特长,几年来,昆山后创公司在与德国 SIEMENS公司自动化与驱动部门的紧密合作过中,建立良好的相互协作关系。 主要优势产品西门子:S7-200CN、S7-200、Smart200、S7-300、S7-400、S7-1200、触摸屏、DP电缆、DP接头、6FC、6SN、S120、V10、V20、V60、V80、G110、G120、6RA、伺服数控备件、NCU、MM系列变频器。

肖特基二极管是以金属和半导体接触形成的势垒为基础的二极管,简称肖特基二极管(Schottky Barrier Diode),具有正向压降低(0.4--0.5V)、反向恢复时间很短(10-40纳秒),而且反向漏电流较大,耐压低,一般低于150V,(信息来源:)多用于低电压场合。
这两种管子通常用于开关电源。
肖特基二极管和快恢复二极管区别:前者的恢复时间比后者小一百倍左右,前者的反向恢复时间大约为几纳秒~!
前者的优点还有低功耗,大电流,超高速~!电气特性当然都是二极管阿~!
快恢复二极管在制造工艺上采用掺金,单纯的扩散等工艺,可获得较高的开关速度,同时也能得到较高的耐压.目前快恢复二极管主要应用在逆变电源中做整流元件.
肖特基二极管: 反向耐压值较低40V-50V,通态压降0.3-0.6V,小于10nS的反向恢复时间。它是具有肖特基特性的“金属半导体结”的二极管。其正向起始电压较低。其金属层除材料外,还可以采用金、钼、镍、钛等材料。其半导体材料采用硅或砷化镓,多为N型半导体。这种器件是由多数载流子导电的,所以,其反向饱和电流较以少数载流子导电的PN结大得多。由于肖特基二极管中少数载流子的存贮效应甚微,所以其频率响仅为RC时间常数限制,因而,它是高频和快速开关的理想器件。其工作频率可达100GHz。并且,MIS(金属-绝缘体-半导体)肖特基二极管可以用来制作太阳能电池或发光二极管。
快恢复二极管:有0.8-1.1V的正向导通压降,35-85nS的反向恢复时间,在导通和截止之间迅速转换,提高了器件的使用频率并改善了波形。快恢复二极管在制造工艺上采用掺金,单纯的扩散等工艺,可获得较高的开关速度,同时也能得到较高的耐压.目前快恢复二极管主要应用在逆变电源中做整流元件.
四、变频器用——电解电容在电路中的作用

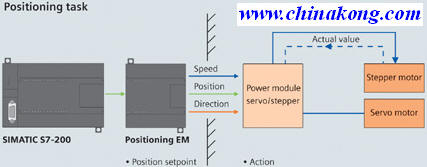
EM253位控模块,速度与精度的协调使用简单、控制精确
EM 253的控制范围从微型步进电机到智能伺服驱动器。
运行快速而不受约束
集成的脉冲接口能够产生200KHz的脉冲信号,位置,速度和方向。
集成的定位开关输入能够脱离处理单元独立地完成位控任务。
适应性强
5V直流脉冲或RS422输入接口。
低震荡
可以选择的“jerk”/S-curve功能可以减小在启动,停止和改变速度时产生的震荡和后座。
控制灵活,功能强大
通过用户程序可以配置和选择25个profile,每个profile可以有多达四个速度改变。
、相对和手动的定位;可以将距离和位置的单位设置为毫米,英寸,度或者脉冲数。
可以选择4种不同的参考点搜索模式。
简便的软件配置,图形化的、集成于STEP 7-Micro/WIN,V 3.2(及以上版本)的向导具有以下功能:
参数化(基本参数的设定)
创建定位profile
确定参考点搜索模式
集成于Micro/Win中的操作简便的EM253控制面板支持参数的在线修改和参数化功能。
三、定位模块EM253技术规范
1、通用规范
| 型号 | 6ES7 253-1AA22-0XA0 |
| 模块结构 | S7-200 扩展模板 |
| EM输入点 | 5 |
| EM输出点 | 8 |
| 尺寸(W×H×D) | 71.2×80×62 mm |
| 重量 | 约190g |
| 外部供电电压 | 11至30VDC |
| 功率消耗 | 2.5W |
| 电流消耗 | 5VDC供电:190mA 24VDC供电:见下文 |
| 组态软件 | STEP 7-Micro/WIN,V 3.2(及以上版本) |
2、输入特性
| 输入数量 | 5点 |
| 输入类型 | 汇点/源点(IEC 类型1汇点,不包括ZP) |
输入电压
允许LMT+、LMT-
电涌(所有输入)
额定值 • STP、RPS、LMT+、LMT- • ZP |
5VDC,供模块使用善脉冲信号的质量和抗扰性。 | ||
2、运行5VDC以上的漏极开路输出,将使射频辐射超过允许的限制。可能需要对系统或布线采取射频辐射防护措施。
四、定位模块EM253与S-200 PLC的兼容性
定位模块EM253可以与各种不同类型的S7-200 CPU(222、224、226 和226XM)相连接:
CPU | 说明 |
| CPU 222版本1.10或更高版本 | CPU 222 DC/DC/DC和CPU 222 AC/DC/继电器 |
| CPU 224版本1.10或更高版本 | CPU 224 DC/DC/DC和CPU 224 AC/DC/继电器 |
| CPU 226版本1.10或更高版本 | CPU 226 DC/DC/DC和CPU 226 AC/DC/继电器 |
| CPU 226XM版本1.10或更高版本 | CPU 226XM DC/DC/DC和CPU 226XM AC/DC/继电器 |
五、定位模块EM253模块LED状态表

本地I/O | LED | 颜色 | 功能说明 |
| - | MF | 红色 | 当模块检测到严重错误时照亮。 |
| - | MG | 绿色 | 当没有任何模块故障时照亮,检测到配置错误时以1赫兹的频率闪烁 |
| - | PWR | 绿色 | 当模块L+和M端子加上24 VDC电源时照亮 |
| 输入 | STP | 绿色 | 当“停止”输入打开时照亮 |
| 输入 | RPS | 绿色 | 当参考点开关输入打开时照亮 |
| 输入 | ZP | 绿色 | 当零脉冲输入打开时照亮 |
| 输入 | LMT- | 绿色 | 当负限制输入打开时照亮 |
| 输入 | LMT+ | 绿色 | 当正限制输入打开时照亮 |
| 输出 | P0 | 绿色 | 当P0输出发出脉冲时照亮 |
| 输出 | P1 | 绿色 | 当P1输出发出脉冲时或当该输出指示正向运动时照亮 |
| 输出 | DIS | 绿色 | 当DIS输出激活时照亮 |
| 输出 | CLR | 绿色 | 当清除漂移计数器输出激活时照亮 |
六、定位模块EM253模块各种接线图
1、EM 253位控模块输入和输出的内部示意图

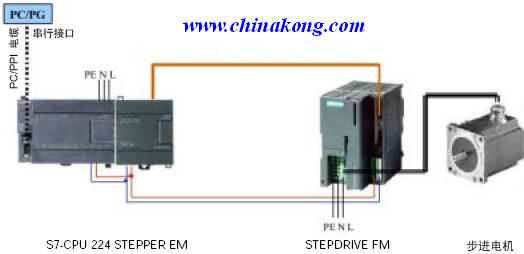
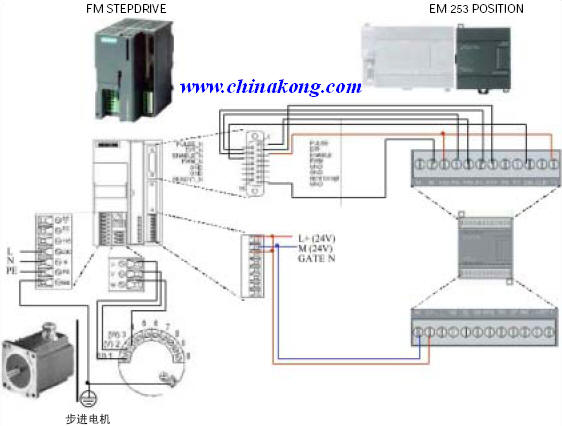
2、EM 253位控模块与SIMATIC FM步进驱动的连接

3、EM 253位控模块与工业设备公司(下一个步进)的连接

4、 EM 253位控模块与定向马达UPK标准的连接

5、EM 253位控模块与Parker/Compumotor OEM 750的连接

七、定位模块EM253模块组态系统简单范例
(1) 接地保护导线(PE)必须采用黄绿双色线;
(2) 三相电源U, V, W分别采用黄、绿、红三色;
(3) 交流控制电路采用红色;
(4) 直流控制电路采用蓝色。
3.导线的绝缘和耐压要符合电路要求;进行控制板内部布线,要求走线横平竖直、整齐、合理,接点不得松动;进行控制板外部布线,对于可移动的导线应放适当的余量,使绝缘套管(或金属软管)在运动时不承受拉力。
4.安装时按钮的相对位置及选择的颜色
(1)“停止”按钮应置于“启动”按钮的下方或左侧,当用两个“启动”按钮
控制相反方向时,“停止”按钮可装在中间。
(2)“停止”和“急停”用红色,“启动”用绿色。
5.安装指示灯的颜色
红—危险或报警
黄—警告
绿—安全
白—电源开关接通
@
PLC系统的模拟量变动很大且不稳定时的故障原因
PLC系统的模拟量是一个变动很大的不稳定的值,可能是如下原因:
你可能使用了一个自供电或隔离的传感器电源,两个电源没有彼此连接,即模拟量输入模块的电源地和传感器的信号地没有连接。这将会产生一个很高的上下振动的共模电压,影响模拟量输入值。
另一个原因可能是模拟量输入模块接线太长或绝缘不好。
可以用如下方法解决:
1) 连接传感器输入的负端与模块上的公共M 端以补偿此种波动。(但要注意确保这是两个电源系统之间系。)
背景是:
模拟量输入模块内部是不隔离的;
共模电压不应大于 12V;
对于60Hz干扰信号的共模抑制比为40dB。
2)使用模拟量输入滤波器。
梯形图编程语言是一种图形语言 ,下表是两种梯形图的继电器符号图对照。
下面两个图分别是继电器控制和PLC梯形图控制的对比。
@
熔断器和热继电器在电气线路中的使用
在电动机控制接线中,主电路中装有熔断器,为什么还要加装热继电器?它们各起何作用,能否互相代替?而在电热及照明线路中,为什么只装熔断器而不装热继电器?
答:熔断器在电气线路中主要起短路保护和严重过载保护作用,而热继电器主要用于过载保护.两者不能互为代用,但可以互为补充.如果用熔断器作电动机的过载保护,为了防止电动机在启动过程中熔断器熔断,熔断器熔体的额定电流一般应取电动机额定电流的2. 5~3倍,这样即使电动机长时间过负荷50%,熔断器也不会熔断,而电动机可能因长时间过负荷而烧坏.所以不能用熔断器作过负载保护.而热继电器是利用电流的热效应来工作的,由于热惯性的影响,尽管发生短路时电流很大,也不可能使热继电器立即动作,这样就延长了短路故障的影响时间,对供电系统及用电设备会造成危害.所以也不能用热继电器作为短路保护.
对于电热及照明设备,由于负载的性质不同于电动机的拖动负载,一般来说,它们不会出现过负载现象,所以,一般不装备热继电器,而只装备熔断器,主要起短路保护作用.
异步电动机接触器联锁正反转控制线路有何优缺点?应如何改进?并画出控制线路。
答:三相异步电动机接触器联锁的正反转控制的优点是工作安全可靠,缺点是操作不便。因电动机从正转变为反转时,必须先按下停止按钮后,才能按反转启动按钮,否则由于接触器的联锁作用,不能实现反转。为克服此线路的不足,可采用按钮联锁或按钮和接触器双重联锁的正反转控制线路。
1,滤波作用,在电源电路中,整流电路将交流变成脉动的直流,而在整流电路之后接入一个较大容量的电解电容,利用其充放电特性,使整流后的脉动直流电压变成相对比较稳定的直流电压。在实际中,为了防止电路各部分供电电压因负载变化而产生变化,所以在电源的输出端及负载的电源输入端一般接有数十至数百微法的电解电容.由于大容量的电解电容一般具有一定的电感,对高频及脉冲干扰信号不能有效地滤除,故在其两端并联了一只容量为0.001--0.lpF的电容,以滤除高频及脉冲干扰.
2,耦合作用:在低频信号的传递与放大过程中,为防止前后两级电路的静态工作点相互影响,常采用电容藕合.为了防止信号中韵低频分量损失过大,一般总采用容量较大的电解电容。
二、电解电容的判断方法
电解电容常见的故障有,容量减少,容量消失、击穿短路及漏电,其中容量变化是因电解电容在使用或放置过程中其内部的电解液逐渐干涸引起,而击穿与漏电一般为所加的电压过高或本身质量不佳引起。判断电源电容的好坏一般采用万用表的电阻档进行测量.具体方法为:将电容两管脚短路进行放电,用万用表的黑表笔接电解电容的正极。红表笔接负极(对指针式万用表,用数字式万用表测量时表笔互调),正常时表
图5-39 选择序列的梯形图三
2.并行序列的编程
(1)使用STL指令的编程
如图5-40所示为包含并行序列的功能表图,由S31、S32和S34、S35组成的两个序列是并行工作的,设计梯形图时应保证这两个序列同时开始和同时结束,即两个序列的步S31和S34应同时变为活动步,两个序列的后一步S32和S35应同时变为不活动步。并行序列的分支的处理是很简单的,当步S0是活动步,并且转换条件X0=1,步S31和S34同时变为活动步,两个序列开始同时工作。当两个前级步S32和S35均为活动步且转换条件满足,将实现并行序列的合并,即转换的后续步S33变为活动步,转换的前级步S32和S35同时变为不活动步。
@
是对图5-40功能表图采用STL指令编写的梯形图。对于并行序列的分支,当S0的STL触点和X0的常开触点均接通时,S31和S34被同时置位,系统程序将前级步S0变为不活动步;对于并行序列的合并,用S32、S35的STL触点和X2的常开触点组成的串联电路使S33置位。在图5-41中,S32和S35的STL触点出现了两次,如果不涉及并行序列的合并,同一状态器的STL触点只能在梯形图中使用一次,当梯形图中再次使用该状态器时,只能使用该状态器的一般的常开触点和LD指令。另外,FX系列PLC规定串联的STL触点的个数不能超过8个,换句话说,一个并行序列中的序列数不能超过8个。
图5-41 并行序列的梯形图
(2)使用通用指令的编程
如图5-42所示的功能表图包含了跳步、循环、选择序列和并行序列等基本环节。
图5-42 复杂的功能表图
如图5-43所示是对图5-42的功能表图采用通用指令编写的梯形图。步M301之前有一个选择序列的合并,有两个前级步M300和M313,M301的起动电路由两条串联支路并联而成。M313与M301之间的转换条件为,相应的起动电路的逻辑表达式为,该串联支路由M313、X13的常开触点和C0的常闭触点串联而成,另一条起动电路则由M300和X0的常开触点串联而成。步M301之后有一个并行序列的分支,当步M301是活动步,并且满足转换条件X1,步M302与步M306应同时变为活动步,这是用M301和Xl的常开触点组成的串联电路分别作为M302和M306的起动电路来实现的,与此同时,步M301应变为不活动步。步M302和M306是同时变为活动步的,因此只需要将M302的常闭触点与M301的线圈串联就行了。
图5-43 使用通用指令编写的梯形图
步M313之前有一个并行序列的合并,该转换实现的条件是所有的前级步(即步M305和M311)都是活动步和转换条件X12满足。由此可知,应将M305,M311和X12的常开触点串联,作为控制M313的起动电路。M313的后续步为步M314和M301,M313的停止电路由M314和M301的常闭触点串联而成。
编程时应该注意以下几个问题:
1)不允许出现双线圈现象。
2)当M314变为“1”状态后,C0被复位(见图5-43),其常闭触点闭合。下一次扫描开始时M313仍为“1”状态(因为在梯形图中M313的控制电路放在M314的上面),使M301的控制电路中上面的一条起动电路接通,M301的线圈被错误地接通,出现了M314和M301同时为“1”状态的异常情况。为了解决这一问题,将M314的常闭触点与M301的线圈串联。
3)如果在功能表图中仅有由两步组成的小闭环,如图5-44a所示,则相应的辅助继电器的线圈将不能“通电”。例如在M202和X2均为“1”状态时,M203的起动电路接通,但是这时与它串联的M202的常闭触点却是断开的,因此M203的线圈将不能“通电”。出现上述问题的根本原因是步M202既是步M203的前级步,又是它的后序步。如图5-44b所示在小闭环中增设一步就可以解决这一问题,这一步只起延时作用,延时时间可以取得很短,对系统的运行不会有什么影响。
图5-44 仅有两步的小闭环的处理
(3)使用以转换为中心的编程
与选择序列的编程基本相同,只是要注意并行序列分支与合并处的处理。
(4)使用仿STL指令的编程
如图5-45所示是对图5-42功能表图采用仿STL指令编写的梯形图。在编程时用接在左侧母线上与各步对应的辅助继电器的常开触点,分别驱动一个并联电路块。这个并联电路块的功能如下:驱动只在该步为“1”状态的负载的线圈;将该步所有的前级步对应的辅助继电器复位;指明该步之后的一个转换条件和相应的转换目标。以M301的常开触点开始的电路块为例,当M301为“1”状态时,仅在该步为“1”状态的负载Y0被驱动,前级步对应的辅助继电器M300和M313被复位。当该步之后的转换条件X1为“1”状态时,后续步对应的M302和M306被置位。
针应先向电阻小的方向摆动,然后逐渐返回直至无穷大处。表针的摆动幅度越大或返回的速度越慢,说明电容的容量越大,反之则说明电容的容量越小.如表针指在中间某处不再变化,说明此电容漏电,如电阻指示值很小或为零,则表明此电容已击穿短路.因万用表使用的电池电压一般很低,所以在测量低耐压的电容时比较准确,而当电容的耐压较高时,打时尽管测量正常,但加上高压时则有可能发生漏电或击穿现象.

所有评论仅代表网友意见,与本站立场无关。