









帝淮双向反馈式塔式起重机/塔机/塔吊工业遥控器
我司双向反馈式塔式起重机/塔机/塔吊工业遥控器,整套包含1台发射器+2台接收器+模拟量输出开关量反馈控制器合计4个部分,遥控距离按照100米提供,1号接收器端设计为RS485输出,与被控端PLC之485接口以Moudbus协议通信,专门针对PLC采集的塔机高度、塔机幅度、吊重、总力矩,这4个数据反馈到发射器端液晶屏显示出来。2号接收器,包含RS485+10或12路继电器输出,用于开关量模拟量输入输出混合式控制器,2台接收器均有急停对应的1路常开点继电器输出。
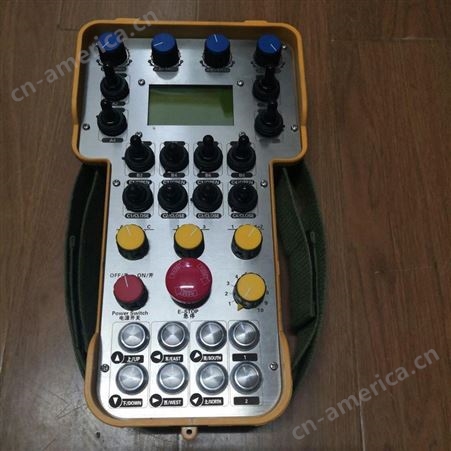
发射器端按钮布局及功能说明,
1)总体布局2个摇杆“起升手柄"、“变幅/回转",两位旋钮功能包含“电源开关"、“动力启动"、“屏变幅启动"、“屏起升启动"、“启动/停止"、“回转刹车",电位器1个“油门开关",按键2个“电铃"、“限位去除",红色指示灯2个“塔机报警"、“发动机报警", “锁定/解锁"按键1个,液晶屏,遥控启动+总急停旋钮。
2)1号摇杆为单轴一字型控制方式,自复位模式,用于控制吊钩上升下降,前推和后推时,首先对应1路方向开关量控制,继续推动则对应模拟量输出即为调速控制《 0-10V/上升或0-(-10V)/下降》;
3)2号摇杆为万向无极摇杆,自复位模式,前后左右四个方向分别对应变幅增大、变幅减小、左回转、右回转。
同理四个方向推动时首先对应1路方向开关量控制,继续推动则对应模拟量输出即为调速控制,比如前后推动对应变幅大小控制,此时输出0-10V/变幅增大或0-(-10V)/变幅减小;左右推动对应左右回转,此时输出0-10V/变幅增大或0-(-10V)/变幅减小;
摇杆具备X轴Y轴坐标平面,Y轴正负10度角以内均视为Y轴方向直线推动的目的,只要偏离超过10度角时,才视为想实现X轴Y轴2个方向的联动,且随着摇杆在夹角位置的变化,X轴Y轴方向的输出呈现跟随角度不同比例变化。X轴正负10度角同理。
4)两位旋钮功能包含“电源开关"、“动力启动"、“屏变幅启动"、“屏起升启动"、“启动/停止"、“回转刹车",6个两位旋转开关,每个均对应接收器端1路开关量信号输出,连接被控端中间继电器进而驱动后端交流接触器;
5)按键2个“电铃"、“限位去除",每个按键对应接收器端1路开关量信号输出,电铃为点动模式控制,限位去除,均为点动模式。
6)油门开关,布局为1个电位器,对应接收器端0-10V输出;
7)红色指示灯2个“塔机报警"、“发动机报警",对应2号接收器端2路开关量信号输入反馈。
8)显示屏反馈显示信息(本次定制5寸大屏幕显示):塔机高度、塔机幅度、吊重、总力矩, PLC给入信息则在液晶屏上显示出来,给入多久则显示多久,直到数据出现新的变化;另有常规显示内容:电池电量、信号强度、操作按钮提示信息等。
9)发射机双供电:考虑到屏幕大耗电多,且遥控器始终不断的实时双向心跳包监测,故此本次设计为内置双供电模式,采用2块锂电池供电,分为1号电池、2号电池,布局旋转开关用于选择1号和2号,且布局2个充电孔,各自专门充电,配置2个充电器。
10)1个“使能"按键,针对面板摇杆布局设计,摇杆操作时,只有结合同时按下“使能"按键,操作摇杆才会有效,否则无动作。
11)启动+急停旋钮,急停对应2路继电器输出含1路常开点,常规使用常开点,常闭点作为备用。启动即为启动发射器本身电源开关,同时对应接收器端输出控制回路的接通,此时被控端设备通电,急停拍下,则可瞬间切断所有输出。发射器端的启动按钮关闭,发射器端电源关掉,且5秒钟后,接收器端亦可自我急停,保障安全!
本次双向反馈式塔式起重机/塔机/塔吊工业遥控器定制型号DH-Z1YW1YL1M2F2X6SX(DC24V/100米/1发2收/双向反馈/RS485 Moubuds/输入输出转换器)!








所有评论仅代表网友意见,与本站立场无关。