
2023年06月16日 14:13:21 来源:玉环双山机械有限公司 >> 进入该公司展台 阅读量:12
机械手的结构组成主要包括执行机构、驱动系统、控制系统以及位置检测装置,如图1.1。
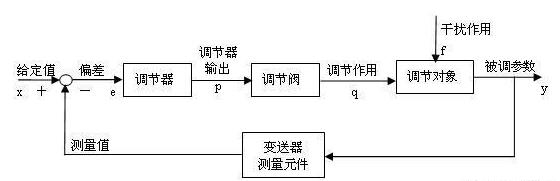
图1.1 机械手组成图
(1)执行机构,主要包含手部、手腕、手臂和立柱等,如图1.2。手主要与物品接触,夹持或吸附物品,握手由手指(或爪)和力传递机构组成。吸附式是通过真空装置和橡胶对零件进行真空吸附;手腕是连接手和手臂的部分;臂支持所捕获的物体、手和手腕;柱是机械手执行器的支撑部分,其他部件在柱上,可以实现机械手的旋转和手臂的上下扩张。
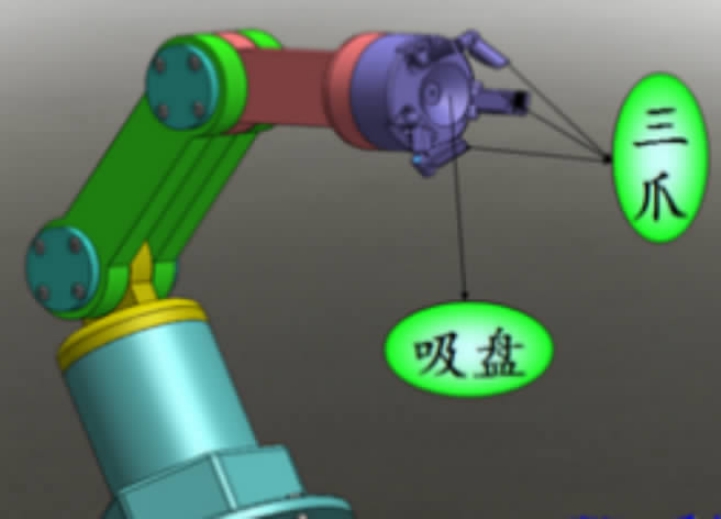
图1.2 机械手执行机构
(2)驱动系统,它是机械手的动力装置,是执行机构运动的基础。机械手的设计包括液压传动、气动传动和机械传动。
(3)控制系统,该系统是一个控制机器人的系统,主要通过驱动系统来控制机械手。它一般由程序系统和定位系统组成。定位系统是机械手移动到一定位置的控制装置。该程序系统具有机械手的运动顺序、运动轨迹、运动速度和时间等控制指令。
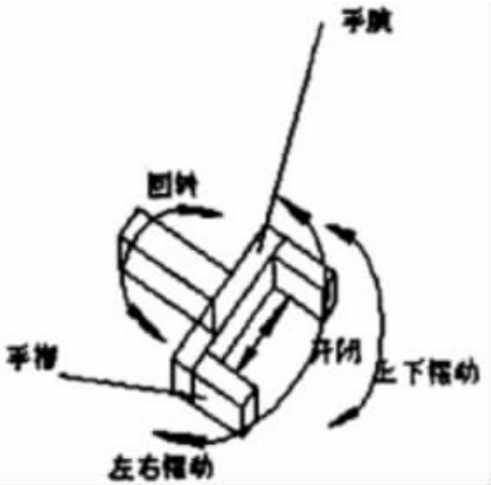
图1.3 机械手运动示意图
在设计机械手时,机械手的运动形式和坐标是非常重要的。机械手的坐标系是直角坐标、圆柱坐标、球坐标和关节.这些坐标系提升,收缩和旋转机械手。通过这些坐标系和机械手的自由度,最终实现了机械手的运动,如图1.3。
在机械手的设计中,一般采用气动驱动,气动成本低,在驱动装置的设计中,气缸的设计是最重要的,气缸的受力既要满足机械手的夹紧力,又要满足复合制造成本低的要求,气缸属于单向作用缸。根据力平衡原理,单向作用缸活塞杆的输出推力必须克服弹簧的反作用力和活塞杆工作时的总阻力,其公式为:
式中:F1-活塞杆上的推力,N
Ft-弹簧反作用力,N
Fz-气缸工作时的总阻力,N
P-气缸工作压力,Pa
D—气缸直径。
机械手的驱动方式有以下几种:
(1)液压驱动机械手,这种机械手具有抓取物重量大、手握力大、结构紧凑、运动速度快等特点,但其缺点是容易发生漏油,不能在高温或低温环境下工作;
(2) 气压驱动机械手,通过压缩空气压力驱动执行器的运动。该驱动方式的压力相对较低,但生产成本低,结构简单,但由于压力低,机械手的运动速度较低;
(3) 电动传动机械手,这种方式是通过电机驱动机械手,电机可以是感应电机、直线电机或功率步进电机,不需要这种中间传动装置,因此机械结构简单。其中,直线电机机械手具有运动速度快、行程长、维护和使用方便等优点。
在机械手的设计中,主要的结构和硬件是非常重要的。例如,在设计机械手座椅时,需要有两个电机来驱动,一个是驱动机械手旋转,另一个是在机械手移动时驱动机械手。在设计机械手关节时,必须考虑齿轮之间的功率传递,这些设计内容是机械手设计的主要方面。



