
2023年06月16日 14:16:13 来源:玉环双山机械有限公司 >> 进入该公司展台 阅读量:12
机械手是一种自动控制设备,它模仿人的手的结构,按照人的要求和程序,在规定的时间内完成物料的收集、物料的传递或一定动作的执行。在自动化生产中得到了广泛的应用。
本文设计了驱动轮轴的动力机械手,包括机械部件和结构件的设计以及驱动机构的选择。确定了机械手的坐标系、自由度问题和驱动机构,为机械手的设计和使用提供了理论依据。
2.1 机械手各部位的运动分析
根据臂的运动形状,根据坐标系定位理论,将工业机械手分为四种类型:极坐标系统、直角坐标系统、圆柱坐标系和多关节坐标系。在本设计中,机械手主要由以下几个部分组成:(1)采用直线气动缸驱动运动机构,实现夹具的夹紧。(2)旋转滚筒实现手的旋转运动。(3)腕关节采用轴承连杆,减小阻力,实现小臂的旋转运动。(4)弯头采用轴承连杆减小阻力,实现弯头在平面内的旋转。(5)臂由直线气动缸驱动,驱动上下臂,实现臂绕腰部的旋转,实现执行器垂直方向的定位。(6)腰部采用轴承连杆减阻,实现整个机构的旋转动作。腰部、肘部和手部三对旋转,使整个机构的工作范围实现了立柱周围直径3米以内任意方向的夹紧件。
2.2 机械手各部位介绍
1.驱动机构
驱动机构可分为气动、液压、电动和机械驱动等四类.因为工厂一般都有气源,所以气动成本相对较低,而且安装方便,因此工业中启动选择较多.
2.执行机构
(1)手一般为旋转机构,多为双指机械手,常见形式有:动槽轮结构、连杆结构、齿轮齿条结构和重力结构等。
(2)手腕用于将手指与手臂连接,改变夹紧工件的位置,手腕一般由旋转结构组成。
(3)手臂与手腕相连,驱动手腕及其后续部分在工作范围内移动。
3.控制系统分类
机械手的主要控制因素是空间坐标位置,并注意其加速度、速度等特性.
3.1 基本要求
(1)具有足够的夹紧力;(2)手指的张开角度必须在使用范围之内;(3)要求结构必须紧凑、重量相对较轻、效率要高.
3.2 机械手手抓的设计计算
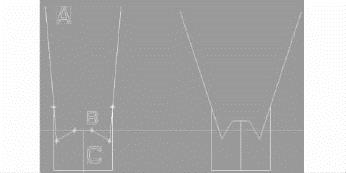
图1 手部结构、受力分析
1.选择手抓形式及夹紧装置选择
本设计为驱动轮和轴助力机械手,手柄直径在30~80 mm之间,重量为60 kg。采用夹持式双指背变换手抓握方式.在气缸的作用下,机械手的手指打开。
2.手抓力学分析
图1为常见的连杆杠杆式手部结构的卡具夹紧和松开状态.
手部结构、受力分析:
A——手指 B——销轴 C——气压缸
拉力F在B点,方向向上且过销轴的中心点,两手指A的对销轴的反作用力分别为F1和F2,其力的方向垂直于手指向外,拉力F由下式计算.
对受力分析可知,角度选为30度到60度之间.
3.手抓夹持范围计算
手抓张开直径大于50mm,活塞杆行程最小为13.5mm.
手指的长度为a=80mm加上定位内b=40mm,中间连接杆长度为c=40mm.拉杆长度d=20mm.支架宽度为e=80mm.当拉杆与支架平齐时手指张开.如图3.2(b)所示.所以半径
Rmax=(((e-d)/2+e/2-20)*3^0.5)/2
=50*1.732/2=43.3mm,取43mm.
所以当两手指碰到一起时,手指为夹角120度角,长度为30mm,如图3.2(a)所示.内部可夹取的轴半径为Rmin,Rmin=30/2/2*3^0.5=12.99mm,取13mm.
手抓夹持、范围为直径26mm到直径86mm.图2(a)中,手指长80mm,手抓张开角为0,此时最小夹持直径为26mm. 图2(b)为手指张开时的情况,其中夹持半径为86mm.
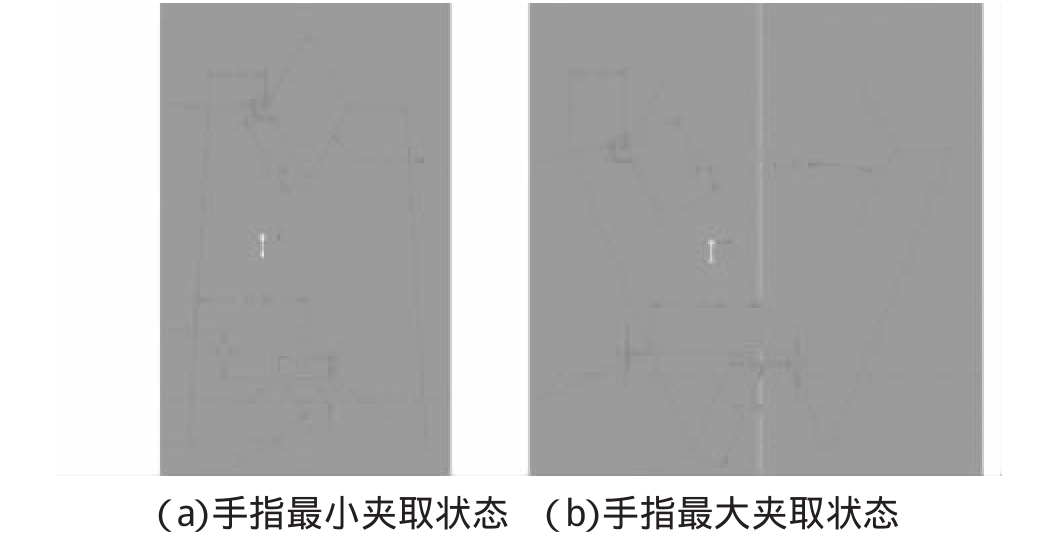
图2 手抓夹持范围计算
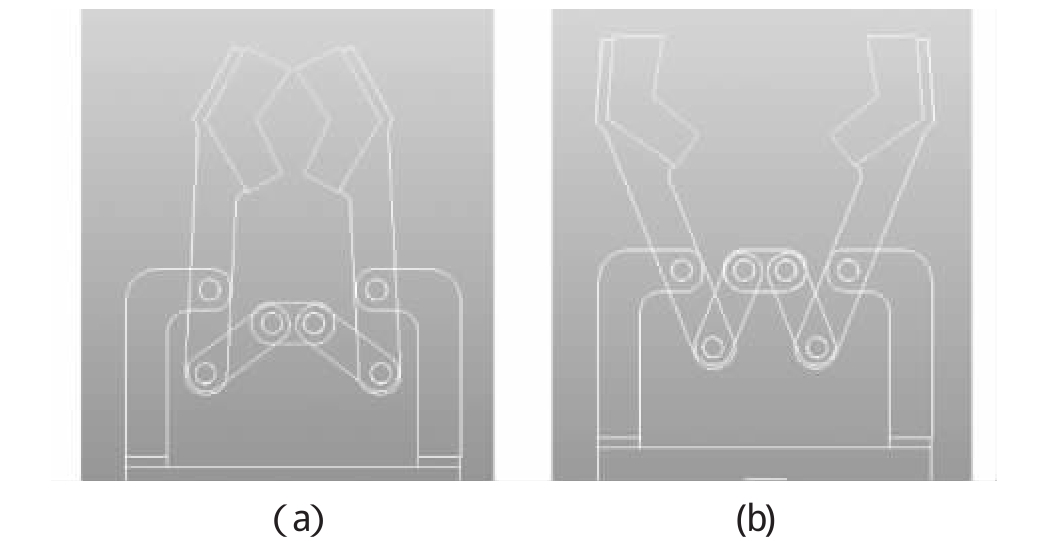
图3 手抓张开示意图
机械手的手臂部件的运动包括回转、伸缩和升降运动3种运动方式,本次设计为手臂的回转运动.
4.1 大臂的尺寸与结构
大臂要保证整体的高度运动范围在0—1000mm以上,运动的角度不得超过90度,即上下不能大于45度,为取大臂有效长度为1800mm.
因为其没有配合等要求,所以采用铸铁直接铸造.截面采用矩形空心结构,能够承受更大的弯曲应力.如图4所示:
4.2 弯臂尺寸与结构
弯臂为第二段手臂,长度决定着水平工作范围,由大臂确定其有效长度1200mm,为了使受力较为均匀,采用铸造矩形空心截面,竖直尺寸为450mm.如图5所示:
图4 大臂结构
图5 弯臂结构
4.3 小臂尺寸与结构
小臂直接连接着腕部,小臂长度选为1580mm.因小臂不受弯力影响,所以选取圆形空心截面铸造生产.
5.1 腰部的整体设计
在本设计中,驱动上、下臂的气动缸安装在腰部,腰部由气缸向上推以向上旋转。两臂杆的顶部位置固定在两个销轴上,使其只能绕其旋转。腰部的底端直接安装在支架上,轴承连杆用于确保腰部可以围绕支架旋转。腰围设定在2300 mm以上,总高度为3300 mm,腰围为1000。
5.2 支架整体设计
支架起支撑整个机构的作用,与腰部用轴承链接无其他配合尺寸,采用铸造圆形空心截面.高度为2300mm.
介绍了机械手的功能和组成,重点介绍了机械手爪和臂的设计计算,并简要介绍了腰部和支座的设计。分析了机械手各部分的运动规律,为机械手的设计和应用提供了理论依据。



