上下料机器人的速度在某些场景中需要将上下料机器人的速度通过总线输出到上位机或PLC中,此处我们以ABB机器人为例:
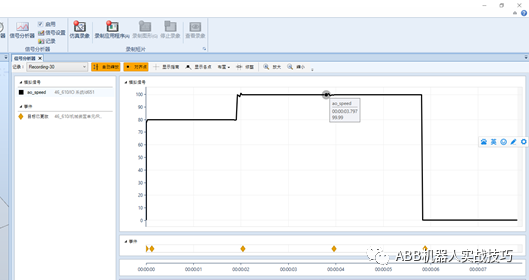
1、通过robotstudio的信号分析器,能对仿真/真机进行速度监控。
2、如何将上下料机器人速度通过现场总线,实时输出给PLC?例如,机器人带有涂胶设备,出胶量应该与机器人速度同步,以保证涂胶的胶型宽度一致。
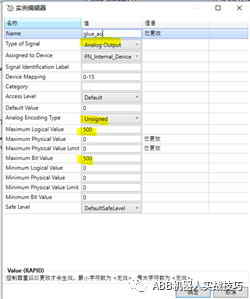
3、创建一个模拟输出信号(相关设置语句只支持模拟量类型数据),如下图。所属设备举例为ABB机器人在PROFINET作为从站。
举例要输出的信号为0-500mm/s,对应的Maximum Logical Value设为500。Maximum Bit Value也设为500,这样机器人发出数据400,PLC接收到也为400.
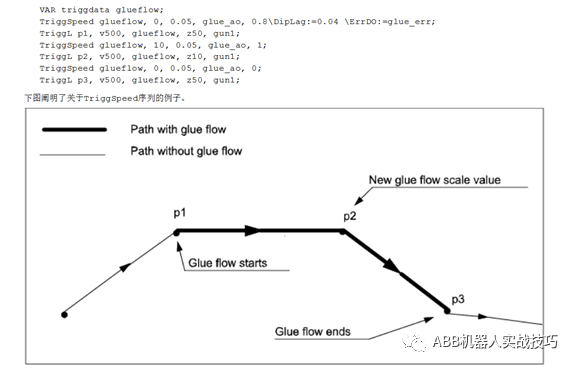
4、可以通过TriggSpeed进行设置。
VAR triggdataglueflow;
TriggSpeedglueflow, 0, 0.05, glue_ao, 0.8\DipLag:=0.04;
!到达下一个点前0mm,再往前0.05s前开始把当前速度(mm/s)乘0.8进行实时输出。
!对机械臂的速度下降进行时间补偿,以致模拟信号输出信号glue_ao在TCP速度出现下降前0.04 s受到影响。
TriggL p1, v500,glueflow, z50, gun1
5、如果想关闭实时速度输出(即调整出胶量为0),可以使用,即输出系数为0
TriggSpeedglueflow, 0, 0.05, glue_ao, 0\DipLag:=0.04;
更多上下料机器人相关内容: